NEC通信システム
サイト内の現在位置
位置測位技術


1. はじめに
近年、IoT(Internet of Things)やDX(デジタルトランスフォーメーション)の推進により、機械や構造物、人、製品などの状態をセンシングし、デジタルデータとして扱う取り組みが行われています。
デジタルデータには、機械や構造物、人、製品などがどこに存在しているかといった情報も必要不可欠であり、位置情報が欠かせない情報となっています。
この技術解説では、位置情報を取得するための技術を紹介し、それぞれの仕組みや特徴を示します。
2. 位置測位技術の種類と仕組み
位置測位技術は数多く存在します。位置を測位する原理でカテゴライズすると、図1のように分類することができます。
電波を用いた位置測位技術は、親機と子機間で電波を送受信することで、子機の位置を推定する技術です。電波は、遮蔽物があっても送受信できることが特徴です。ただし、遮蔽物が金属の場合は電波を反射もしくは吸収してしまうため、金属が多い環境ではうまく動作しない場合があります。
もっとも利用されているのはGPS(Global Positioning System)です。GPS衛星から電波を受信することで、端末の位置を特定します。他にも、 BLE(Bluetooth Low Energy)やWi-Fi、 IMES(Indoor MEssaging System)は屋内で用いられる位置測位技術として利用されています。
光を用いた位置測位技術は、人の目で確認できる可視光や人の目では確認できない赤外線を用いて位置を推定する技術です。光は、直進性が高いため、位置精度を高めることができるのが特徴ですが、光を遮蔽する物が間にある場合には位置推定できません。
光を用いた位置測位技術は、光を利用して通信を行う技術と、画像を利用して位置を分析する技術に細分化できます。光を利用して通信を行う技術は、赤外線や可視光線を用いて、親機と子機間で通信を行うことで、子機の位置を推定する技術です。画像を利用して位置を分析する技術は、カメラで測位対象となる物体や周辺環境を撮影することで、物体の位置やカメラの位置を推定する技術です。
近年注目されているのは、画像を利用して位置を推定する技術です。個体認識は画像から個体を識別し、カメラの画角と画像内の撮影位置から実際の位置を推定します。コード認識は特定のコード(バーコード、QRコード、カラーバーコード、ARマーカー)を認識して位置を推定します。また、カメラが撮影する画像や3Dセンサで取得できる点群データから撮影したカメラや3Dセンサの動きを検出し、自己位置推定と環境地図作成を同時に行うSLAM(Simultaneous Localization and Mapping)やV-SLAM(Visual Simultaneous Localization and Mapping)も実用化されています。
加速度/磁気を用いた位置測位技術は、端末に取り付けられた加速度センサと磁気センサを利用して、端末の運動量と進行方向から端末の移動量を推定する技術です。一定間隔で端末の移動量を推定し、蓄積することで、端末の移動軌跡を取得可能です。ただし、移動量の蓄積と共に誤差も蓄積されるため、別途正確な位置で補正する仕組みが必要となります。
一般的にはPDR(Pedestrian Dead Reckoning)と呼ばれており、カーナビゲーションやスマートフォンでの移動量の推定に活用されています。
その他の位置測位技術としては、音波が挙げられます。音波を発信する子機を施設内に設置しておき、音波を受信する親機が子機の発する音波を受信することで位置を推定する技術です。音波は、スマートフォンなどのマイクでも受信可能であるため、親機の確保が比較的容易であることが特徴です。ただし、遮蔽物や環境音に弱いことが欠点です。
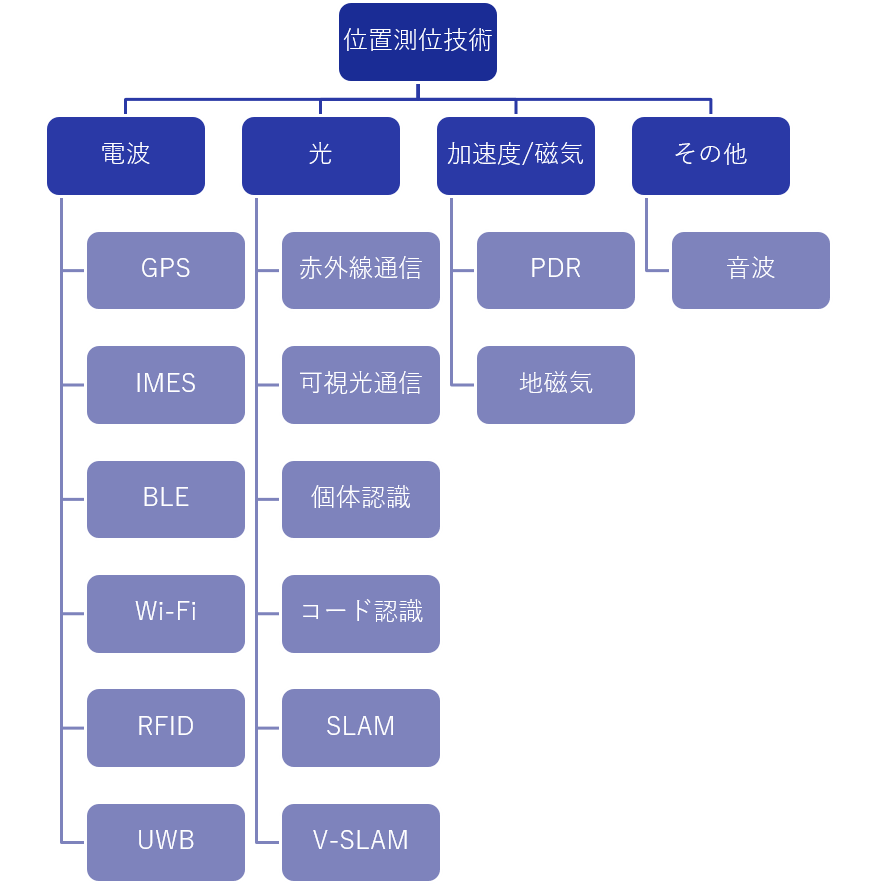
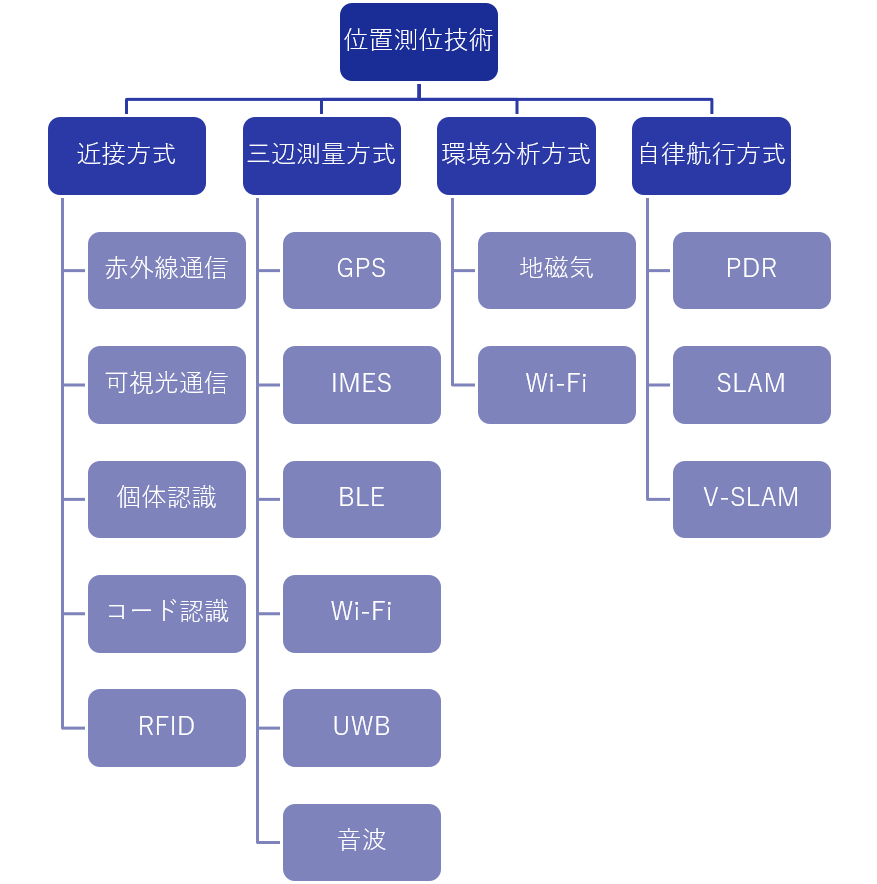
図1では原理により分類しましたが、図2では測位方式で分類しています。
近接方式は、測定側の親機と測定対象となる子機という関係において、親機の測定範囲内に子機が存在する(近接している)ことで、位置を推定する方式です。親機の測定範囲が狭い場合は高い位置測位精度が得られますが、測定範囲が広い場合は位置測位精度は低くなりがちです。
三辺測量方式は、2つ以上の基準点となる親機と測定対象となる子機という関係において、三辺測量を用いて子機の位置を推定する方式です。辺の長さには、親機が発する電波や音波の強度や到達時間が用いられるのが一般的です。より位置測位精度を高めるためには、辺の長さの誤差を少なくする必要があり、強度や到達時間を細かく測定しなければなりません。
環境分析方式は、測定対象となる端末が周辺の環境を測定することで、端末の位置を推定する方式です。あらかじめ移動する範囲の環境(地磁気やWi-Fiアクセスポイント)を測定しておき、その測定結果と端末が測定した結果をマッチングさせることで、端末の位置を特定します。位置精度を保つには、定期的に環境を測定することが求められます。
自律航行方式は、測定対象となる端末が逐次端末に搭載されたセンサを利用して移動量を推定することで、端末の移動軌跡を推定する方式です。センサには加速度や磁気(PDR)、カメラ(V-SLAM)、3Dセンサ(SLAM)が用いられます。移動量の蓄積と共に誤差も蓄積されるため、別途正確な位置で補正する仕組みが必要となります。
3. 位置測位技術の特徴
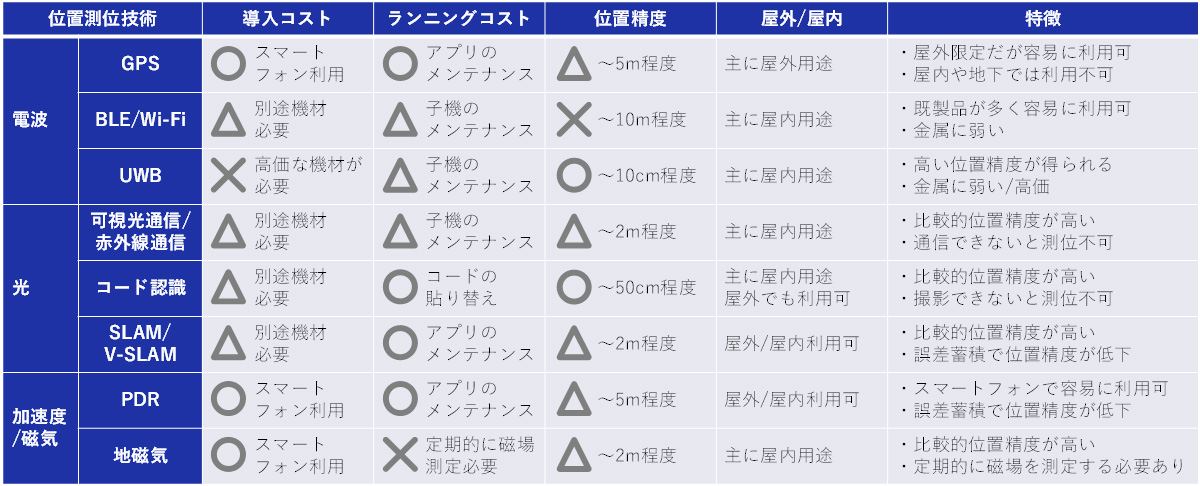
表1に各位置測位技術の特徴を示します。
位置測位技術にはそれぞれ特徴があり、利用するユースケースに合わせて選択することが重要です。一般的に位置精度が高いほど、導入コストが高価になる傾向があります。また、運用時のランニングコストも重要な選択ポイントです。電波を用いた方式では、測位対象に電力を利用する端末を取り付ける必要があり、端末の費用や電池交換の手間が運用時に発生します。
このように、ユースケースで求められる位置精度といった要求事項、導入コストやランニングコスト、端末を取り付けるスペースの有無といった制限事項を考慮し、最適な位置測位技術を選択する必要があります。
表1 位置測位技術の特徴
4. おわりに
位置測位技術について解説しました。位置測位技術は利用している原理や位置測位の方式によりカテゴライズでき、それぞれ特徴が異なります。ユースケースやコストに合った方式を選択することが重要です。
NEC通信システムでは、QRコードやBLEタグを用いて資材の位置監視を行う資材監視ソリューションを提供しています。また、ARマーカーを用いたNEC マーカー位置測位ソフトウェアも提供しています。本ソフトウェアは、光の原理を利用したコード認識ですが、コードにARマーカーを用いることで、より遠くから、より高精度に位置測位を可能としています。
ご興味のある方は以下のリンクより参照ください。
位置の検出にGPSやビーコン、資材の特定にバーコードやQRコードを利用し、屋外/屋内を問わず資材の位置を一元管理するソリューションを紹介します。

資材監視ソリューション
ARマーカーをカメラで撮影した際に得られる3次元位置情報を活用し、物品やフォークリフトなどの位置を高精度に取得するソフトウェアを紹介します。

NEC マーカー位置測位ソフトウェア
※QRコードは(株)デンソーウェーブの登録商標です。